

《网络法律评论》人类-机器人共存的安全性:新ISO 13482服务型机器人安全标准
ISO 13482将给服务机器人的安全认证、产品责任、伦理与保险等制度带来变革性的重大影响
翁岳暄
北京大学法学院 博士候选人, ROBOLAW.ASIA 联合创始人
Gurvinder S. Virk
ISO TC184/SC2/WG7标准工作组召集人
杨书评
SAC/TC159/SC2秘书长, 北京机械工业自动化研究所研究员
摘要:
有别于现存工业机器人之安全标准,新ISO 13482个人护理机器人安全标准将是全世界第一个由ISO国际标准化组织所制定发行用来确保人类与机器人能够碰触彼此、共享空间以容许机器人向人类提供服务的下一代机器人安全标准。新ISO 13482安全标准包含(1)移动服务机器人,(2)载人机器人,(3)物理辅助机器人等三大类服务型机器人之基本安全要求,这种“人类-机器人共存的安全性”在未来将给服务型机器人法制之下的机械安全认证、产品责任、伦理与保险等制度带来变革性的重大影响。
关键词:
ISO 13482安全标准, 人类-机器人共存的安全性, 服务型机器人
The Safety for Human-Robot Co-Existing: On New ISO 13482 Safety Standard for Service Robots
Abstract:
Unlike current existing industrial robots? safety standards, the new ISO 13482 Safety Standard for Personal Care Robots will be the first robot safety standard made by ISO international organization for standardization which allows robots and humans to touch each other, share the same space and provide the services to human beings. The new ISO 13482 safety standard includes (1) Mobile Servant Robots; (2) Person Carrier Robots; (3) Physical Assistant Robots as the three main categories of safety requirements. Furthermore, the ?Safety for Human-Robot Co-Existing? could also bring structural and influential impact for next generation robots? safety certification?product liability?ethics and insurance in the future.
Keywords:
ISO 13482 Safety Standard, the Safety for Human-Robot Co-Existing, Service Robots
时间:2013年10月17日
地点:北京市海淀区三里河路1号 西苑饭店
语言:英语
问 1:请问本会议全名以及它的目标是?
Virk: 目前机器人标准领域里有几个工作组在进行这项工作,就我的了解大概有5至6个工作组在本周以及下周负责这些议程的进行。我参加的是关于机器人安全的议程,其他议程还包含“机器人术语(Robot Vocabulary)”和“机器人性能(Robot Performance)”等。同时我们也有一个更高级别的大型会议。通常情况下我们必须每隔18个月固定进行例会以及发行报告书,所以这次有许多工作组聚集在北京,全部都是负责各种不同的机器人专题,例如本周我加入的是医疗机器人的会议,而下周我们即将进行的会议主题就是现在和你谈论的“个人护理机器人(Personal Care Robots)”。其实医疗用机器人也有安全上的需求,只是它们属于不同的规制框架,换句话说,医疗用机器人安全与工业用机器人安全是截然不同的。当然,它与服务型机器人或个人护理机器人的安全也是不尽相同的,每一种机器人应用都有其专门的安全要求。
问 2:能否请您解释一下“机器人术语(Robot Vocabulary)“呢?
Virk: 我们现在正在做的事情主要是希望当我们使用机器人相关术语时一般社会大众也能清楚理解其意涵。例如“机器人”这个词如果没有一个明确定义的话,基本上它可以指涉很多事物,像是人型机器人、工业生产机器人、车型机器人(机器车)等等。因此制定出共同术语是一件重要的事情,这方面的标准是在去年刚完成修订的ISO 8373。ISO 8373的内容涵盖了机器人领域的所有重要术语,例如“什么是机器人?” 、“机器人装备”、“控制器”等术语在这个标准里面都会以专业方式呈现。对我们而言,拥有共通专业术语是一件重要的事情。
问 3:ISO 13482个人护理机器人安全标准将会是全世界第一个针对服务型机器人的安全标准。为何它如此重要?如果缺乏这个安全标准对于机器人产业将产生何种冲击?
Virk: 到目前为止,唯一存在于人类社会之中的只有工业用机器人,它们的商业化大约始于1960年代中期,而全世界第一个针对工业用机器人的安全标准大约始于1980年代中期,以上是工业用机器人的大致情况。当然所有国家都必须确保它们的产品是安全的,特别是对于体积庞大且力道强劲的工业用机器人。有鉴于此,一般对于工业用机器人安全标准的设计思维总是停留在它们是非常危险的机械,它们的安全设计是以当其运作时人类无法靠近为前提,因为它们可能对人类造成重大伤害。所以现今的安全要求是建立在隔离原则的基础上,人类与机器人将被隔离,无论是真实栅栏或虚拟栅栏。但现在的情况是…历经过去10至15年的发展,许多国家与企业已经成功开发出能够相当接近人类的机器人,同时这些机器人在设计上并不是投入制造业的,而是尝试提供人类各种不同态样的服务。当你被机器人提供服务时是不可能采行隔离原则来确保你人身安全的,所以你必须去发展一套当机器人运行时同时能够容许人类与机器人共存于同一空间的安全要求。这就是ISO 13482的重要之处,因为它将是第一个被国际性ISO标准化组织所制定用来确保人类与机器人能够碰触彼此、共享空间以容许机器人向人类提供服务的机械安全标准。如果缺乏这个标准,虽然机器人公司依然能够制造与贩卖服务型机器人,一旦发生问题时特别是遇到像你们这样的法律人,这些公司将被送上法庭,他们到时必须证明他们的产品是安全的,但在缺乏一个国际性认可的安全要求情况下,这些公司将难以向法庭证明他们产品的安全性。
附带一提,ISO是个自愿性组织,所有对机器人感兴趣的国家都能获邀参加,接着会有许多投票表决活动进行,当我们同意之后,这些安全要求的内容将被以文件的形式出版。比方说我制造了一具机器人,我把它交给一个机构进行认证然后我也顺利地获得ISO认证,这时我就可以走进法庭向他们说“你看!我这里拥有安全认证文件,这表示我的机器人完全符合ISO的安全要求,我也达成了国际通行认可的安全标准,现在我的机器人是非常安全的。”这种认证是万一事情发生的一种保证,如果一部车导致死亡结果究竟是驾驶的责任或是汽车制造商的责任?如果你可以证明汽车制造商有设计方面的疏失,那么汽车制造商将必须承担法律责任。机器人的情况也是如此,就服务型机器人领域而言我们目前还没有对应的安全要求,这也是为何13482安全标准如此重要,它建立了基准。当然,因为它是新建立的标准所以在未来可能还需要面临持续性的修订,接下来的每三年里我们委员会将定期检视标准,看看这些内容是否仍然有效?是否需要被修改?以上是我们ISO国际机器人与机器人装备标准化分技术委员会WG7工作组(ISO/TC184/SC2/WG7)对于新13482服务型机器人安全标准的后续维护方式。
问 4:坊间有人宣称日本在ISO 13482服务型机器人安全标准专家组里面占有领导的地位,请问这是否属实?ISO 13482里面的大部分规则与内容都是按照日本代表所提出之方案为基础吗?
杨: ISO 13482服务型机器人安全标准的召集人是来自英国的Gurvinder Virk教授,按照国际标准的规则,至少有5个P成员国家必须推荐专家共同起草此项标准。不可否认,日本专家对此标准的贡献很大,包括HONDA等日本大公司都派专家参加了WG7工作组,他们在会议上有很多输入,包括很多评论(COMMENTS),我记得在2012年10月韩国WG7工作组会议上,专家们每天从早9点工作到晚9点, 5天时间内处理完600多条评论,而大部分评论来自日本和德国。而且,随着ISO 13482即将发布,这个工作组后续有两个与之相关的项目,其中之一《机器人与机器人设备-个人护理机器人与安全相关的测试方法》就是由日本NEDO项目组提出,现在由日本专家主导进行的,值得高兴的是,我国纳恩博公司的王野先生也参加了此标准的制定,提出了不少代步机器人的测试方法。
问 5:能否请您介绍一下ISO国际机器人与机器人装备标准化分技术委员会(ISO/TC 184/SC2)以及其附属工作组?
Virk: ISO/TC184的分技术委员会Sub Committee 2成立于1983年,当时成立目标是从事机器人标准化工作,主要还是关注在制造业环境及其工业应用,因为当时(制造业)这方面的机器人应用受到广泛地使用。接着稍晚一点标准化工作又扩展到了工业化环境上,因为工业化环境的范围比制造来得大,例如工厂。到了2006年,ISO对于机器人标准化的目标又修改成“机器人与机器人装备(Robots and Robotic Devices)“,SC2现在的名称就是机器人与机器人装备分技术委员会,它的意义是现在机器人能够在各种不同环境下作业,所以我们也应该考虑开发能够适应这些环境的机器人。基本上它的发展进程就是由“制造”、“工业化环境”过渡到“机器人”。对于不同的机器人应用我们也必须采用不同的安全要求。SC2分技术委员会也是目前ISO国际标准化组织里唯一从事机器人标准化工作的单位。另外在IEC也有一些处理电子科技的标准化委员会,他们标准化的对象也包含一些特定化的机器人,例如家事机器人就是i-Robot公司的ROOMBA机器人吸尘器,但是ISO与IEC之间也有许多密切合作。面对机器人这个词语,其安全标准主要是由ISO来处理,原因在于ISO擅长于机械的安全确保,而IEC所擅长的是电子化设备,机器人不只是电子产品,它同时也具备机械属性,它能碰你,它能伤你,它也能揍你,甚至可能抓伤你,以上都是机器人潜在的机械危险(Hazard),这也是为何ISO 委员会的存在对于机器人的社会接受度推展而言如此地重要。
ISO与IEC有着紧密的合作,特别是在医疗用机器人这个领域,我今天正好结束这个会议。医疗用电子设备是IEC的强项,所以当你谈到医疗用机器人标准化这一块时,必须同时关注到擅长机器人的ISO以及擅长医疗电子的IEC。事实上医疗用机器人标准化工作是在ISO与IEC联合委员会的体制下推展的。
问 6:您的WG7工作组是在何时决定制定ISO 13482标准呢?在什么动机之下?
Virk: 正式决定始于2008年,但我们在2005年已经开始关注机器人标准化议题,并思考我们需要怎么样的新标准?我们有哪些选项?其中何者应该置于优先顺位等问题。在2006年我们已经决定机器人安全是许多候选议题中最为重要的,之后两年间我们开始关注服务型机器人安全,然后在2008年决定了将重点置于个人护理机器人(Personal Care Robots),因为个人面向的机器人与人类互动议题将是关键,这也是为何13482是第一个始于2008年的安全议题。现在这个项目即将告一段落,我们的标准制定已经进入最终草案阶段 - FDS/FDIS阶段,也可以称为最终国际标准草案(Final Draft International Standard)。这个阶段意味着我们已经满足了所有技术内容,现在所要做的就是进入最后表决程序,同时所有会员国将被要求提交意见书,然后必须在表决结束后的3个月内将新标准对外公开发行,13482安全标准即将在今年底完成。至于制定此标准的动机,那很清楚就是为了促进人类与机器人的共存,这是最主要的理由。
问 7:能否请您介绍一下北京机械工业自动化研究所以及贵所近年来在ISO/IEC等国际化标准组织所参与的活动?
杨: 机器人与机器人装备标准分技术委员会的国内编号为SAC/TC59/SC2,对口ISO/TC184/SC2国际标准化组织,秘书处设在北京机械工业自动化研究所,从2009年开始,秘书处陆续向ISO/TC184/SC2各工作组推荐了8名正式注册专家,分别参加了WG7(个人护理机器人)、JWG9(医疗机器人的安全)、WG8(服务机器人)各工作组的工作,中国专家在服务机器人模块化领域比较活跃。在国家项目的支持下,实质性地参与了相关国际标准的编写工作。2013年10月,成功在北京西苑饭店承办了第21届ISO/TC184/SC2年会和工作组会议,为机器人领域的国际标准化做出了自己的贡献。
问 8:ISO 13482标准何时将出版?从那里可以下载或取得文件?
Virk: 我想大概在2014年初。你可以直接从ISO官网下载,但这是必须付费的。很不幸地ISO与IEC的模式是政府参与但是经费由其他机构的购买作为资金来源。我个人认为这将会是一个问题,我们之中有些人试着反映这个问题并且呼吁我们必须考虑其他的资金来源。对于这些开销或许政府可以考虑给我们资助,但不管如何我们最终还是输了,所以是政府决定你必须花钱来取得这些文本的。
问 9:您是如何选择WG7的成员?目前在WG7中有几位中国代表呢?
Virk: 我们不做选择,事情的发生是当WG7工作组建立之后接着会有个“专家征求“的活动。首先有一个规划书策划这个领域的工作项目,然后所有国家都将被询问“您对此感兴趣吗?”与“您是否支持此项目?”等问题,这只是个Yes or No简单的投票表决过程。对于工作项目规划书被接受与否完全是基于简单多数决的方式,举个例子,我想分技术委员会大概有21个参与成员(P Member),P代表“参与”(Participating),另外还有些观察成员(O Member), O代表“观察“(Observing),国家必须透过出资以换取获得席次的机会。比方说中国的机器人产业发展很有潜力,所以中国就决定加入作为参与成员,对于有21位参与成员的分技术委员会来说,若有15位成员参与表决,那么至少必须8票赞成7票反对,你才能获得简单多数;或者有2位成员参与表决,如果2位都同意那么你也是获得简单多数,这就是基本的游戏规则-“在参与成员的投票表决中你必须获得多数”,这是第一件事。接着第二件事是至少必须有5个国家提供专家支援,这个工作项目才能成立,但如果参与成员的数目很少,例如只有10位或9位,那么可以将专家支援的数目减少至4个国家或更少。像纳米科技在5年前或10年前甚至可能只有一个国家参与标准化工作,所以根本不可能找到10或5个参与成员。对此他们另外有特殊的应对规则,然而机器人这个领域目前已经有足够的成员,无论如何都必须有5个以上的国家派出专家支援,所以如果中国对机器人标准化有兴趣,那么首先它必须先申请加入到ISO分技术委员会里面,然后再派几位专家来参与我们的工作。就中国目前在WG7工作组的专家,我想应该有2位。
杨: 只有1位,他是浙江大学的杨灿军教授。
Virk:
杨教授是医疗复健机器人的专家,所以我们目前只有1位中国代表,我最近正打算请杨书评教授帮忙寻找几位人选。
问 10:能否请您进一步解释一下“观察成员”呢?
Virk: 观察成员他们不能参加工作项目但是可以获得相关文件。虽然观察成员不能直接影响工作组,但是他们支付较少的费用。理论上他们可以参加会议,可是必须坐到最后面,和参与成员的少许对话是被允许的,但他们不能参与投票表决。
问 11:新ISO 13482包含(1)移动服务机器人(Mobile Servant Robots),(2)载人机器人(Person Carrier Robots),(3)物理辅助机器人(Physical Assistant Robots)。能否请您介绍关于这三个种类的区别以及基本概念?
Virk: 移动服务机器人,顾名思义它是可以自由移动的,它的应用在于家事支援(Domestic Setting),它可以提供给你多样化的家事支援。基本上你给他一些指示然后他会依照你的指示来执行任务,例如你跟机器人说“去拿点东西过来”,然后它马上就按照你的指令把东西取给你。
翁: 您是指机器人不需要人员的遥控操作就能完全自动地完成任务吗?
Virk: 是的,它自动地替你完成工作。当然,它可能是ROOMBA吸尘器机器人,也可能是其他移动式服务型机器人。接着是所谓的载人机器人,它的特色在于协助你由A地点移动到B地点,外观看起来有点像汽车的机器人,但是它不能上公共道路,它必须在公共道路之外的环境下运行,它可以是一部放在家中使用的小车,或者在机场里面用来提供载客服务的车辆,但是不被允许在公共道路上运行。至于物理辅助机器人是一种机器人透过提供物理性质的支持来协助人们进行一些工作,例如机械外骨骼,当你穿戴上它的时候它可以协助你行走。以上三种就是目前个人照护机器人的基本分类。
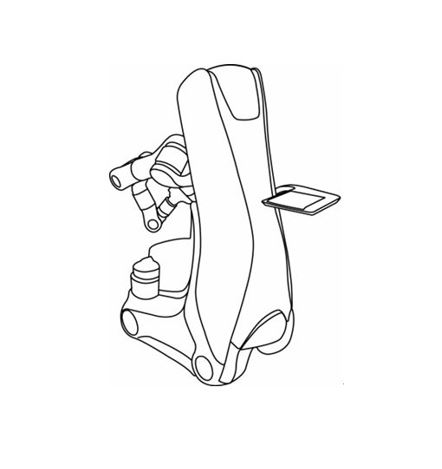
图 1. 移动服务机器人(图片来自ISO/FDIS 13482)
问 12:ISO 13482里面的“移动服务机器人(Mobile Servant Robots)”似乎是以车轮式自走机器人为主要对象,那么该标准是否也包含“履带式”,“双足步行”等自走机器人在内呢?或者这些“非轮式”的自走服务型机器人是您们在下阶段所规划进行的工作项目?
杨: 如Virk教授所提到的,ISO 13482标准适用的机器人分三类,一种是在室内或公共环境中活动的移动机器人(如图1),第二种为可穿戴的外骨骼等物理辅助机器人(如图2),第三种为载人机器人(图3),载人机器人其中有一种是腿式移动机器人。(如下图所示)但ISO 13482确实不涉及履带式机器人。目前在下阶段的规划项目中暂时没有“履带式”机器人的安全标准项目。
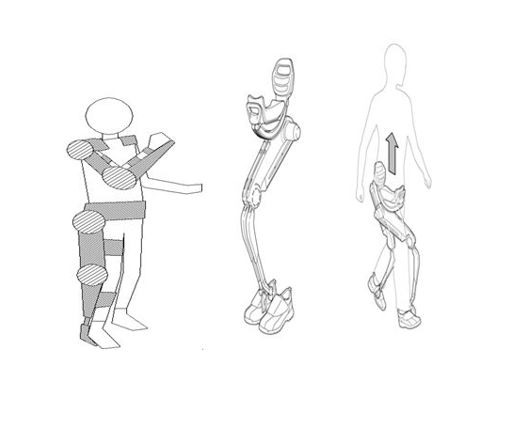
图 2. 物理辅助机器人(图片来自ISO/FDIS 13482)
问 13:就移动服务机器人而言,ISO 13482新安全标准是否涵盖服务机器人使用神经网络或遗传算法的功能?
Virk: 13482标准并未规范实践机器人安全的具体做法,所以上述两者并未被包含在标准里面。基本上它的要求是这样的,如果制造商要搭配神经网络或遗传算法是可以的,只要一切符合ISO的安全要求。总而言之,ISO 13482安全标准并不要求你要“如何做“,它关注的是“什么是必须做的”。

图 3. 载人机器人(图片来自ISO/FDIS 13482)
问 14:今年初我在日本东京时曾关注到一则新闻报道是筑波Cyberdyne公司宣布他们的物理辅助机器人“HAL” 成功获得ISO/DIS 13482安全认证的消息 。我的问题是(1)像HAL机器人外骨骼套装可能有哪些潜在风险?(2)能否请你介绍一下ISO/DIS 13482安全认证的基本概念?
Virk: 当套上机器人外骨骼套装后它将能够辅助你进行一些物理活动。很明显地穿戴使用机器人套装的潜在风险在于外骨骼套装可能移动你的关节往一个你所无法配合的方向或角度上面,像是用这种方式弯曲你的手肘很可能会造成你的手骨折。如果机器人外骨骼套装的设计上出现问题的话,可能违反你关节通常的运作方向。以上就是HAL机器人外骨骼套装的潜在风险。
现在我们安全标准对于这个问题的对策有二。首先,你可以考虑用“低风险物件”的方式解决,这指使用者必须强过机器人套装最大出力的设计方式,在这种思维下的机器出力大约只有你的50%左右,假设一件工作所需的力量是100%,我自己出力60%,机器套件出力40%,那么即使机器出错这种力道还在我的抵抗范围内,因为我的身体力量强度足以抵抗它,同时我也不会因此造成骨折。和高性能辅助比较起来这种方式下机器人套装提供更多层次的辅助可被视为一种较安全的方式。所以如果我很虚弱,我只有20%的力量我无法自行移动,我需要机器人套装提供80%的力量协助我移动,在这种情况下你可以想象万一机器人套装发生错误,我大概就会因此而骨折了。此外还有一种方式是比较复杂的,我必须搭载更多的传感器以及控制器,并且确认它们的情况是否完好,这种方式与前者相较之下需要更高的成本。
问 15:我的博士联合培养导师,早稻田大学理工学术院高西淳夫教授(Atsuo Takanishi)提醒我在将来有三件事将很大程度地影响机器人法制的发展,分别是“安全认证”,“保险”与“黑盒子”。就安全认证这一块,请问新ISO 13482安全认证和目前工业机器人安全认证相比有何差异之处?
Virk: 黑盒子在我们的内部会议中已经被人讨论过了,还有保险与安全认证也是。但是如何实践这些概念目前还没有人知道。
我想当ISO 13482服务型机器人安全标准发布以后世界各国将陆续开始发展认证的方法,特别是对于依照安全要求的设计。所以他们会进行许多的测试,并且在相关经验与知识累积之后一切将会变得比较和缓。刚开始或许在日本采取的方案与欧洲的做法完全不同,也可能与中国的方式不同,所以我们WG7也注意到此事并且开始策划下一阶段的任务 -“如何使用ISO 13482?”。
翁: 您是否指安全认证也会被涵盖在13482下一阶段的发展中?
Virk: 是的,安全认证也是如何使用ISO 13482的一部分。这牵涉到管理者与使用者如何验证我们标准的条款。这就如同我前面所提到的,我的标准里面包含许多条款内容,你只选择X方案去达成条款的要求,然后我们需要的是找独立的第三者来确认你所做的是否与安全标准的内容符合。如果没有这些测试的话到时候将发生一些事情,所以现阶段你可能必须在不同国家之间进行各式各样的认证获动,而且结果很可能不尽相同。在ISO制定认证方法之前,不同国家将会有不同的做法。下一步要做的就是制定ISO自身的认证程序。主要想法还是在于“公司要如何使用这些标准?”,“管理者与验证者要如何验证这些条款?”,这两件事情即将在本周的会议进行讨论,但是开始行动之前我们还需要三年的时间准备。
问 16:台湾大学智慧机器人及自动化国际研究中心主任罗仁权教授(Ren C. Luo)曾经向我表示他的按摩疗程服务型机器人 面临安全认证的问题。请问台大按摩疗程机器人是否适用于新ISO 13482服务型机器人安全标准呢?
Virk: 仅从字面上我无法判断按摩疗程机器人是用于医疗或者非医疗的服务应用?
翁: 我想可能是投入于医疗相关的应用。
Virk: 当然,罗教授的机器人必须要通过安全认证才能走出实验室,不过他需要的可能是医疗用机器人安全。不像一般机器人是归类于机械领域,医疗用机械的规定比较复杂,这也是我们现在有许多工作组在处理医疗用机器人安全规定的原因所在。我认为按摩疗程机器人应该适用医疗机械这一块。
问 17:刚刚Virk教授提到ISO 13482全球性的机器人安全认证最快在2017年前后推出,日本似乎也已经建立起自身的ISO 13482安全认证体系以满足其国内服务型机器人厂商的需求,那么在这段3年过渡期间内中国是否会建立起自身的ISO 13482服务型机器人安全认证机制?或者国内厂商面对安全认证的需求时得透过海外安全认证专门机构来解决?
杨: 安全认证这个领域我不太了解。但我希望在不久的将来中国能建立起自身的ISO 13482服务型机器人安全认证机制。
问 18:富士康正在考虑采用更多的工业机器人在生产组装线上。新一代的工业机器人如Rodney Brooks教授开发的 Baxter与川田工业的Nextage首次具备与人类工人一同上工的能力,根据我的调查,新一代工业机器人适用另一套ISO 10218安全标准,能否请您介绍一下10218给我们的读者呢?
Virk: 10218适用于工业安全,以往在工厂里面机器人与人类是被要求彻底分开的,但现在工业机器人发展的潮流趋势在于与人类合作进行作业的“合作式机器人(Cooperative Robots)“。举个例子,Baxter是出力非常虚弱且移动极为缓慢的机器人,对于此点我们正在思考如何能做出点实质性的成果,当然制造用机器人需要力量但Baxter本身没有力量,它只能做一些小事情与慢工。这也是为何人们称Baxter是个符合“本质安全”的机器人,因为它移动的速度很慢以至于任何人都可以及时躲开。它的速度大约只有120毫米/秒,我还不是很确定,有一张表可以供你参考。
像我现在这样碰你一下对你来说应该没有什么。Baxter遵循这些原则被制造,基本上慢速并不是问题,力道不足才是问题所在。如果你想做制造业,机器人无论如何都必须有足够的力量才行,这也是Baxter与工业用机器人现在所面临的难题。不过工业机器人的ISO安全标准化工作组已经在思考要如何让工业机器人能够和人类合作上工。尽管目前还未能实现,他们已经开始尝试着手进行,他们的方向是研究“在对人类造成伤害之前机器人触碰人类力道的极限为何?”。当然就机器人安全来说对人类造成伤害的结果是绝对不允许的,所以他们的目标是确认“疼痛指数”。我们人类可以感受压力,如果机器人对你施加力量,这是压力,你可以感受的这股力量。如果我接着持续地增加力量,当力道不断加强,在一个临界点上这股力量将转化为疼痛的痛觉。所以在感受“力量”与“疼痛”的中间应该是有一道界线的。
这个ISO工作组现在追求的就是寻找在身体各个不同部位中由受力到痛感的临界点,我想他们应该已经完成人体29个部位的确认工作。由于疼痛还不是伤害,所以他们以此作为设定安全的极限,如果机器人出力把你弄成瘀青,那是伤害;如果机器人把你割伤,那也是伤害;如果它把你弄成骨折,那是重大伤害。所以在不造成伤害的最低限度那就是疼痛,疼痛就是他们所追求的目标。
问 19:能否请您介绍一下ISO 13482在人机互动方面的基本规范?究竟“人为失误“在这个安全标准里是如何被看待的?
Virk: 在风险评估方面ISO 12100是比较基本的规范,它也是一般人在设计机械时所必须遵守的基本流程。13482与10218在风险评估上都是参考12100的规定,关于ISO 12100的设计方法论可以分成三部分。首先,你尝试设计一部系统,如果你的系统是机器人的话,那么你设计的机器人必须符合本质安全,所以你要去确认他们是小体积、重量轻、缺乏力量、移动缓慢的。如果你成功地落实这一步,那么即便机器人出了问题也无法对你造成严重的伤害,所以第一步是关于本质安全。但是在一般情况下你可能有特殊用途的需求,例如机器人套装可能要举起体重100公斤的人,那它在设计上就不能是轻量的,同时也需要添加几个大型的马达。当你在特殊功能的考虑之下不得不牺牲本质安全时,你接下来的做法就是考虑加上若干“保护措施“,例如你可以在机器人套装的设计上增加一些措施防止它移动到一些人类关节无法应对的方向与角度。所以第二步是“保护措施”,也就是你透过一些技术手段来减低你所确认的潜在危险。每一个步骤都是减低风险,直到它降低到一个可以接受的范围为止。当然你不可能将风险降低至零,第三个步骤先以汽车为例,由于汽车是很危险的机械所以通常会伴随若干训练与规制,或者你附上相关的使用说明,举例来说,你放了一个标签,在上面可以写“这是危险物品,请小心使用!”。
以上大概就是ISO 12100风险评估的三步骤,首先你确认风险尽量避免它发生,万一发生了则透过保护措施来减低伤害,最后则是提供使用者使用的说明与警语。
问 20:在2007年日本经济产业省发布了“次世代机器人安全性确保大纲” ,请问您对此有何评价?
Virk: 我还没有看过这份安全大纲所以我对它的详细情形并不清楚。我猜在2007年我们刚开始制定服务型机器人安全标准不久,当时日本似乎也曾经参与其中。在时间上2007年实在有点早,他们大概有提过,那时候我们才刚了解如果要让下一代机器人持续发展与被接受最重要的一件事情就是确保机器人安全,我们必须确保机器人安全达到一个国际标准。我想日本的次世代机器人安全性确保大纲大概是在谈这些事情吧。
问 21:一个正在浮现的“开放组织风险”- 一种来自于自动机械与非结构化环境之间互动产生的不确定性逐渐成为下一代机器人安全的热点 。似乎传统的安全标准无法有效地解决这个问题,那么ISO 13482对此是否有任何解决对策?
Virk: 在高风险区域产生伤害的机率是很高的,首波进入市场的机器人大概也不会投入这些高风险区域之中。目前我们正在思考的是关于自律性该如何被妥适地运用,自律性可以增加风险同时也能减少风险,例如一部智能化汽车它的感知与反应都比人类来得快上许多,所以在这种情形下自律性的确可以增加安全,但是在一些场合中自律性会使得安全性更加难以被确保。换句话说,自律性与风险并不总是在相同的方向上,我们必须特别小心的是当自律性增加风险的情况,这不是一个好点子,为何要让自律性增加风险而使事情变得更糟呢?你必须考虑的是能够降低风险的自律性,因为人类的反应实在太慢了,特别是在高风险的非结构化环境中一切将变得更糟,所以现阶段仔细检讨为何要导入自律性是较根本的做法,直到我们能够开发出足够稳定的自动机器人为止。这也是目前ISO几个安全标准化工作组在思考的问题。附带一提,自律性与风险并没有必然的关系,一切取决于你如何使用它们,你可以增加或减少风险。如果你想增加风险,那么你必须思考为何你要增加风险?例如一个手术经验丰富的老外科医生,由于上了年纪以至于有着手抖的毛病,或许他可以藉由操作远程控制医疗手术机器人来替他掌手术刀,由于老医生的动作缓慢所以它能够降低自动移除肿瘤产生的风险。还是一句老话,在初期最好不要把机器人自动化应用投入到高风险环境中,特别是它将可能会招惹到你们这些法律人。
问 22:请问ISO 13482安全标准在现阶段是否有与任何法律机构或保险公司进行合作呢?
Virk: 我最近确实收到不少邮件,除了你之外还有好几位律师与我联系,他们也意识到了这标准的重要性所以和你问了差不多的问题。我想律师的投入与公众对于机器人安全性议题的重视可能也是未来趋势之所在,只要机器人大规模地投入商业化那么法律纠纷就必然会出现。但是就实质合作方面,我们现在还没有与任何法律或保险机构进行合作,我所做的就只是像现在这样在能力范围内提供一些信息给你们。
问 23:我在欧盟FP7机器人法律项目的同事 Pericle Salvini博士告诉我,他们曾经在一个意大利小镇里投入DustCart机器人在户外公共区域里进行收集垃圾的实验 。他们发现服务型机器人投入人类日常生活环境除了面临到法律障碍之外还有保险的障碍。由于机器人具备自动化功能伴随相当高的不确定性,所以保险公司表示费率难以计算。请问您是否相信ISO 13482将有助于保险公司计算出服务型机器人的保险费率方案?
Virk: 我认为13482标准对于保险费率的计算将有所帮助,因为我们发展出一套方法论主要是关于界定低风险的应用。基本上精明的制造商应该会采用我们的方案,因为除了制造出低风险的产品之外,保险费率也更加地容易计算。
其实我对于这个实验也有所了解,主要是Paolo告诉我的(注:Paolo Dario教授,欧盟FP7机器人法律项目主持人),虽然他当时在替机器人办理保险上并不顺利但最后他还是决定去做了。他自己决定承担可能的风险,不过幸好一切顺利地完成。我还告诫他如果出事情的话,说不定你的大学就得关门大吉了。这实在是一个很大的风险,如果换作是我的话很有可能就不会去做这件事,因为这实在不值得,除了保险之外背后牵涉到的法律责任问题也很大。不过多亏他的坚持我们才能够有在户外环境中实际测试服务型机器人的机会。
问 24:自2003以来日本开始投入设置所谓的“机器人特区”,在特区范围内公司与科研机构可以进行户外环境中的机器人实验 。您是否对于机器人特区有任何评论?
Virk: 我想类似日本的这种制度将会有助于鼓励机器人的研究与开发,不若50或60年前,在高诉讼风险的现代社会里开发科技产品是越来越难了,有这种制度可以增强公众对于产品的信心,所以我喜欢这个想法。
问 25:事实上ISO 13482与ISO 10218修订版也可能会影响到法律。例如在过去劳工卫生安全法规规范工业机器人必须用栅栏与人类隔离开来,但现在各国相关法规正面临被修改的命运,特别是在对于隔离人类的规定上。此外,当我们有了新安全标准之后,我们才能更进一步地去界定什么是“安全”,“可容忍的风险”与“危险”,这对于判断服务型机器人的产品责任来说是非常重要的。然而,这里还有一个问题是目前仍无法解决的-“如果机器人的判断失误导致人员受伤,这是谁该负责,制造商?设计者?持有人?”。我的问题是”功能安全(Functional Safety)“是否能够避免机器人判断失误的情形?或者相反地,在一些特别的条件下功能安全是否会导致机器人的判断失误?
Virk: 就我所知目前的情况是如果工业机器人发生失误的话通常是由系统整合者来承担责任。你的工厂可以买KUKA机器人,ABB机器人或安川电机机器人,然后你会需要一个系统整合者来统整这些机械,所以一般情况下是由系统整合者来负责。除非这个机器人有特殊的设计瑕疵存在,尽管去证明设计瑕疵并不容易,一旦成功的话那么就可能是设计系统的人必须承担责任。以上是目前工业机器人的处理方式。
现在我要介绍一种合作式系统,它的一个问题在于能够与人类合作生产的范围非常地小,主要原因还是在于背后庞大的法律责任。工业机器人也出现了一种”共同作业窗(Cooperation Windows)“,例如在箱子里面你玻璃窗外透过双手与另一侧的机器人合作,而我们关注的部分主要是当人靠近窗户时安全应该如何被确保?像是手指在挥动时机器人就必须减低速度。这还是工业面的应用,至于服务型机器人将会完全地不一样,因为服务型机器人的设计在本质上就是以确保人类与机器人互动之间的安全性。工业用机器人则是不同的方式。
问 26:您的标准是否有任何知识产权政策?如果是的话,谁是贡献者?他们是否持有许可证?
Virk: 没有,我们的标准没有知识产权政策。
问 27:请问您的标准是否有任何商标权?例如谷歌的“安卓(Android)”?
Virk: 完全没有,标准由ISO工作组制定,到时候它将和其他一般的标准一样供人使用。
问 28:我曾在早稻田大学人型机器人研究所担任外国人研究员,当时我对于高西研究室的人型双足步行机器人WABIAN-2R非常感兴趣 ,依您的看法ISO 13482的移动服务机器人与早稻田的双足步行机器人有何差异?何者是对于未来发展双足步行机器人的安全性其最大的挑战?
Virk: 我想发展双足步行机器人安全性这方面,首先要考虑的是它从事的任务,它可能适用移动服务机器人的安全标准也可能适用载人机器人的安全标准,它们的确可以替你完成一些任务,或者就我所知有些人型机器人可以提起重物,那么它们也可以被考虑用于物理辅助机器人,总之双足步行机器人可能适用三者当中的任何一个,完全取决于它的任务性质而定。
然而就稳定性这方面,我们知道让机械两只脚平衡步行仍然是件不容易的事情,所以让机器人用两只脚的方式执行任务还是深具挑战性的,例如如果双足步行机器人载人行走的话,对于其安全性之确保我想还是难以做到的。
问 29:ISO/TC184/SC2分技术委员会是否考虑过发展无人自动驾驶车的相关安全标准?
Virk: 没有,无人自动驾驶车必须投入在公共道路上。对于汽车有着和人员搭载机器人不同的安全规制。
问 30:您是如何看待20年后的机器人安全?您是否相信佐治亚理工学院Ron C. Arkin教授的“嵌入式伦理”概念 将可能在融入未来的机器人安全体系中?
Virk: 当然,伦理议题将日益显得重要但并不限于Ron C. Arkin的研究。事实上Arkin正在搞许多军事机器人的相关研究,这也是机器人伦理之所以重要的主要理由。
一般说来当你开发了一种X应用,通常会衍生出另外一种Y应用,而X应用相当受人欢迎,但是Y应用却非如此。例如物理辅助机器人用在协助老年人生活起居是一件好事,但是相同的技术却也可能用在提升军人在战场上的行动力,这也是一般人所不喜欢的,所以我认为机器人伦理非常地重要。
《科技与法律》 期刊 - 中国科技法学会, 北京大学法学院主办:
汽车智能化的道路:智能汽车、自动驾驶汽车安全监管研究 - 翁岳暄,(德)多尼米克?希伦布兰德
《网络法律评论》 期刊 - 北京大学出版社:
人类-机器人共存的安全性:新ISO 13482服务型机器人安全标准 - 翁岳暄,(英)G.S. Virk, 杨书评
云计算问责视角下的合同问题与等级服务协议 - 翁岳暄
Law via the Internet: 为何中国没有LII? - 翁岳暄, (意)Giovanni Sartor, (意)Giuseppe Contissa, (意)Enrico Francesconi, (意)Ginevra peruginelli
人机共存社会中隐含的开放组织风险:评 "开放式机器人" - 翁岳暄
