




Pesquisa em ROBOLAW.ASIA
Robótica Social
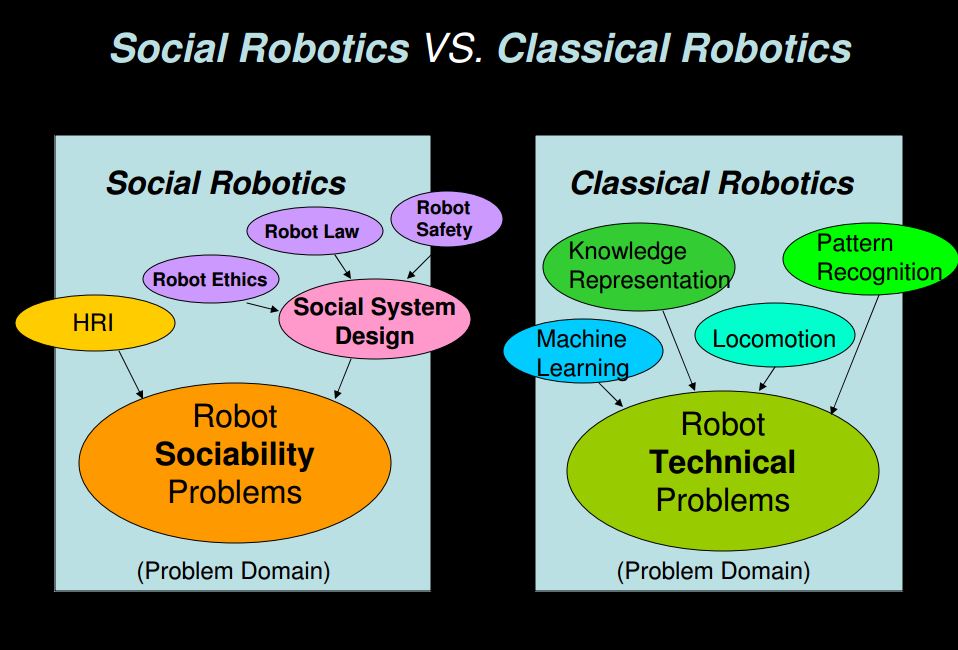 Figura 1. Robótica Social VS Robótica Clássica
Figura 1. Robótica Social VS Robótica ClássicaComo a tecnologia evolui e a demanda por adoção de robôs para servir as pessoas aumenta, Robôs Sociais está se tornando um campo promissor no campo de estudo da “Coexistência Humano-Robô”. Nós podemos citar essa área problemática como "problema de sociabilidade robótica", que cobre muitos problemas incluindo inteligência artificial, ciência da computação, engenharia mecânica, ciência cognitiva, filosofia, lei, etc. Baseado na figura 1, nosso interesse especial por Robótica Social é investigar a intersecção entre a interação humanos-robôs e seu contraste no sistema social. Por exemplo, explorar pode ser: como podemos fazer robôs se tornarem sociais? Como robôs de serviço são vistos por leis de “aceitação social” em diferentes sociedades? ; Tomando como base a árvore de lei robótica de Asimov como uma possível solução para implantar a “Segurança da Inteligência” para garantir a interação segura de humano-robô? E como considerar fatos culturais para discutir regras e normas entre as integrações humano-robô?
 Peccioli RoboTown: Um framework aberto para experimentar sistemas robóticos e serviços em pequenas cidades
Peccioli RoboTown: Um framework aberto para experimentar sistemas robóticos e serviços em pequenas cidades
Contribuição:
01. Pericle Salvini (2015) On Ethical, Legal and Social Issues of Care Robots, Samer Mohammed, Juan C. Moreno, Kyoungchul Kong, Yacine Amirat (Eds.) in Intelligent Assistive Robots, Springer International Publishing [LINK]
02. Pericle Salvini (2012) Presence, Reciprocity and Robotic Mediations: The Case of Autonomous Social Robots, International Journal of Technoethics, Volume 3, Issue 2 [LINK]
03. Gabriele Ferri, Alessandro Manzi, Pericle Salvini, Barbara Mazzolai, Cecilia Laschi, Paolo Dario (2011) DustCart, an autonomous robot for door-to-door garbage collection: From DustBot project to the experimentation in the small town of Peccioli, Paper presented on the 2011 IEEE International Conference on Robotics and Automation (IEEE ICRA'11). SHICC, Shanghai, China [LINK]
04. Yueh-Hsuan Weng (2010) Beyond Robot Ethics: On a Legislative Consortium for Social Robotics, Advanced Robotics, Vol. 24, No. 13, Page 1919-1926, Leiden: VSP-BRILL [PDF]
05. Pericle Salvini, Gaetano Ciaravella, Wonpil Yu, Gabriele Ferri, Alessandro Manzi, Barbara Mazzolai, Cecilia Laschi, Sang-Rok Oh, Paolo Dario (2010) How safe are service robots in urban environments? Bullying a robot, Paper presented on the 2010 IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN'10). Viareggio, Italy [LINK]
06. Pericle Salvini, Cecilia Laschi, Paolo Dario (2010) Design for Acceptability: Improving Robots’ Coexistence in Human Society, International Journal of Social Robotics, Vol.2, No.4, Page 451-460, Springer Netherlands [LINK]
07. Yueh-Hsuan Weng, Chien-Hsun Chen and Cheun-Tsai Sun (2009) Toward The Human-Robot Co-Existence Society: On Safety Intelligence for Next Generation Robots, International Journal of Social Robotics, Vol.1, No.4, Page 267-282, Springer Netherlands [PDF]
08. Pericle Salvini, Edoardo Datteri, Cecilia Laschi, Paolo Dario (2008) Scientific models and ethical issues in hybrid bionic systems research, AI & SOCIETY, Vol.22, Issue.3, Page 431-448, Springer-Verlag [LINK]
09. Yueh-Hsuan Weng, Chien-Hsun Chen and Cheun-Tsai Sun (2008) Safety Intelligence and Legal Machine Language-Do we need the Three Laws of Robotics?, Y. Takahashi (Ed.) in Service Robot Applications, Vienna: I -Tech Education & Publishing KG [PDF]
10. Pericle Salvini, Cecilia Laschi, Paolo Dario (2007) Roboethics in Biorobotics: Discussion of Case Studies, IEEE International Conference on Robotics and Automation (IEEE ICRA’07) Workshop on Roboethics, Rome, Italy, 14th April 2007 [PDF]
