




Invstigaceión en ROBOLAW.ASIA
Robótica Social
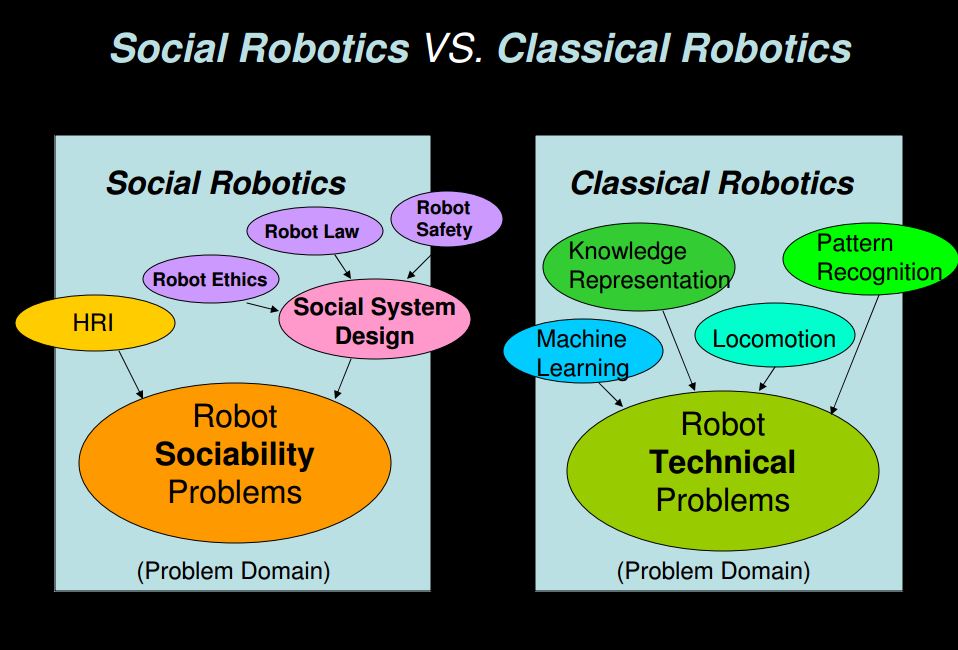 Figura 1. Robótica Social vs. Robótica Clásica.
Figura 1. Robótica Social vs. Robótica Clásica.A medida que evoluciona la tecnología y la demanda de adopción de robots para servir a la gente aumenta, la robótica social se está convirtiendo en un campo prometedor en el estudio de "convivencia humano-robot". Podemos referirnos esta problemática como Problemas sobre la sociabilidad de los robots"; que abarca muchos temas, incluyendo la inteligencia artificial, la informática, la ingeniería mecánica, la ciencia cognitiva, la filosofía y el derecho, etc. Con base en la Figura 1, nuestro especial interés en la robótica social es investigar la intersección entre la interacción humano-robot y el diseño del sistema social. Posibles exploraciones podrían ser: ¿cómo podemos hacer que los robots sean socialmente más compatibles? ¿Qué nivel de “aceptación social” existe en diferentes sociedades sobre los robots de servicio? ¿Son las tres leyes de la robótica de Asimov una solución viable para la aplicación de una "seguridad inteligente" para garantizar la seguridad en la interacción humano-robot? ¿Cómo se podrían tener en cuenta los antecedentes culturales para discutir las reglas o normas de interacción humano-robot?
 PECCIOLI RoboTown: Un marco abierto para experimentar sistemas y servicios avanzados de robótica en una ciudad pequeña real.
PECCIOLI RoboTown: Un marco abierto para experimentar sistemas y servicios avanzados de robótica en una ciudad pequeña real.
Contribución:
01. Pericle Salvini (2015) On Ethical, Legal and Social Issues of Care Robots, Samer Mohammed, Juan C. Moreno, Kyoungchul Kong, Yacine Amirat (Eds.) in Intelligent Assistive Robots, Springer International Publishing [LINK]
02. Pericle Salvini (2012) Presence, Reciprocity and Robotic Mediations: The Case of Autonomous Social Robots, International Journal of Technoethics, Volume 3, Issue 2 [LINK]
03. Gabriele Ferri, Alessandro Manzi, Pericle Salvini, Barbara Mazzolai, Cecilia Laschi, Paolo Dario (2011) DustCart, an autonomous robot for door-to-door garbage collection: From DustBot project to the experimentation in the small town of Peccioli, Paper presented on the 2011 IEEE International Conference on Robotics and Automation (IEEE ICRA'11). SHICC, Shanghai, China [LINK]
04. Yueh-Hsuan Weng (2010) Beyond Robot Ethics: On a Legislative Consortium for Social Robotics, Advanced Robotics, Vol. 24, No. 13, Page 1919-1926, Leiden: VSP-BRILL [PDF]
05. Pericle Salvini, Gaetano Ciaravella, Wonpil Yu, Gabriele Ferri, Alessandro Manzi, Barbara Mazzolai, Cecilia Laschi, Sang-Rok Oh, Paolo Dario (2010) How safe are service robots in urban environments? Bullying a robot, Paper presented on the 2010 IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN'10). Viareggio, Italy [LINK]
06. Pericle Salvini, Cecilia Laschi, Paolo Dario (2010) Design for Acceptability: Improving Robots’ Coexistence in Human Society, International Journal of Social Robotics, Vol.2, No.4, Page 451-460, Springer Netherlands [LINK]
07. Yueh-Hsuan Weng, Chien-Hsun Chen and Cheun-Tsai Sun (2009) Toward The Human-Robot Co-Existence Society: On Safety Intelligence for Next Generation Robots, International Journal of Social Robotics, Vol.1, No.4, Page 267-282, Springer Netherlands [PDF]
08. Pericle Salvini, Edoardo Datteri, Cecilia Laschi, Paolo Dario (2008) Scientific models and ethical issues in hybrid bionic systems research, AI & SOCIETY, Vol.22, Issue.3, Page 431-448, Springer-Verlag [LINK]
09. Yueh-Hsuan Weng, Chien-Hsun Chen and Cheun-Tsai Sun (2008) Safety Intelligence and Legal Machine Language-Do we need the Three Laws of Robotics?, Y. Takahashi (Ed.) in Service Robot Applications, Vienna: I -Tech Education & Publishing KG [PDF]
10. Pericle Salvini, Cecilia Laschi, Paolo Dario (2007) Roboethics in Biorobotics: Discussion of Case Studies, IEEE International Conference on Robotics and Automation (IEEE ICRA’07) Workshop on Roboethics, Rome, Italy, 14th April 2007 [PDF]
