




ROBOLAW.ASIA Research
Social Robotics
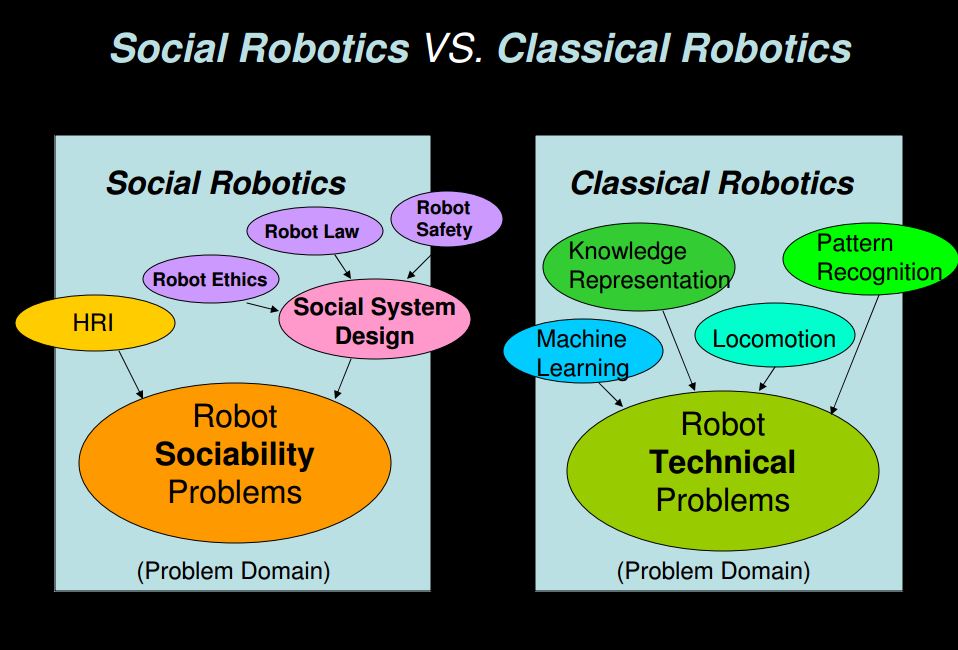 Figure 1. Social Robotics VS. Classical Robotics.
Figure 1. Social Robotics VS. Classical Robotics.As technology evolves and the demand for adopting robots to serve people increases, Social Robotics is becoming a promising field in the study of “Human-Robot Coexistence”. We can refer this problem area as “Robot Sociability Problems” which refers to associated problems that will resemble or merge with those in other fields as robots are increasingly integrated into human society.
Sociability is the skill, tendency or property of being sociable or social, or of interacting well with others. This ability is very important to human beings; compared with human sociability, robot sociability is clearly artificial, and therefore the property and relationship between humans and robots can be totally controlled by humans. Designing Robot Sociability can be divided into two aspects. The first is a micro perspective or Human-Robot Interaction, which covers various unspoken rules in human-robot daily interactions. For example, for a service robot in human living environments it is important for it to know proximities or how to keep a proper distance from different people or situations. The second is the macro perspective, where the aim is to decide what kind of ethics, policy and law can be applied into autonomous robots, called Social System Design.
There will be a strong demand for working ethical and legal factors into the design process of intelligent sociable robots as they are incorporated into human society. On the one hand, intelligent robots should abide by moral obligations from a human-centered value system, but on the other hand, regulators have to consider the design of corresponding social systems in order to support their daily interactions within human living environments. Therefore, we will need an interdisciplinary way of thinking about the design of intelligent robots.
Based on Figure 1, our special interest in Social Robotics is to investigate the intersection between Human-Robot Interaction and Social System Design. For example, explorations may be: how we can make robots more socially compatible? ; how service robots are received by public’s “social acceptance” in different societies? ; Asimov’s Three Laws of Robotics as a feasible solution for implementing the “Safety Intelligence” to ensure human-robot safely interaction? ; and how to consider cultural background to discuss the rules or norms of human-robot interaction?
 Peccioli RoboTown: An open framework for experimenting advanced robotic systems and services in a real small town
Peccioli RoboTown: An open framework for experimenting advanced robotic systems and services in a real small town
Contribution:
01. Yueh-Hsuan Weng (2017) Towards Integrated Governance for Intelligent Robots: A Focus on Social System Design, in Proceedings of the 20th International Legal Informatics Symposium (IRIS 2017), Universität Salzburg, Austria, Page 191-198, Austrian Computer Society, February 2017, ISBN: 978-3-903035-15-7 [LINK]
01. Rafael Capurro and Yueh-Hsuan Weng (2016) Quest for Roboethics: An interview with Prof. Rafael Capurro, TECH and LAW Center & Robohub [LINK]
02. Ronald C. Arkin and Yueh-Hsuan Weng (2016) Technical challenges in machine ethics, TECH and LAW Center & Robohub [LINK]
03. Joanna Bryson and Yueh-Hsuan Weng (2016) How do we regulate robo-morality?, TECH and LAW Center & Robohub [LINK]
04. Hiroko Kamide and Yueh-Hsuan Weng (2016) One being for two origins: A new perspective on roboethics, TECH and LAW Center & Robohub [LINK]
05. Yi-Wei Keng and Yueh-Hsuan Weng (2016) When robots become art: Interview with Yi-Wei Keng, TECH and LAW Center & Robohub [LINK]
06. Yueh-Hsuan Weng (2010) Beyond Robot Ethics: On a Legislative Consortium for Social Robotics, Advanced Robotics, Vol. 24, No. 13, Page 1919-1926, Leiden: VSP-BRILL [PDF]
07. Yueh-Hsuan Weng, Chien-Hsun Chen and Cheun-Tsai Sun (2009) Toward The Human-Robot Co-Existence Society: On Safety Intelligence for Next Generation Robots, International Journal of Social Robotics, Vol.1, No.4, Page 267-282, Springer Netherlands [PDF]
08. Yueh-Hsuan Weng, Chien-Hsun Chen and Cheun-Tsai Sun (2008) Safety Intelligence and Legal Machine Language-Do we need the Three Laws of Robotics?, Y. Takahashi (Ed.) in Service Robot Applications, Vienna: I -Tech Education & Publishing KG [PDF]
