

《Internet Law Review》The Safety for Human-Robot Co-Existing: On New ISO 13482 Safety Standard for Service Robots
ISO 13482 could also bring structural and influential impact for next generation robots? safety certification, product liability, ethics, and insurance in the future
Yueh-Hsuan Weng
Peking University Law School, ROBOLAW.ASIA Initiative
Gurvinder S. Virk
ISO TC184/SC2/WG7 and IEC/ISO JWG9
Shuping Yang
SAC/TC159/SC2, Member(China) of ISO TC184/SC2/WG7
Abstract:
Unlike current existing industrial robots? safety standards, the new ISO 13482 Safety Standard for Personal Care Robots will be the first robot safety standard made by ISO international organization for standardization which allows robots and humans to touch each other, share the same space and provide the services to human beings. The new ISO 13482 safety standard includes (1) Mobile Servant Robots; (2) Person Carrier Robots; (3) Physical Assistant Robots as the three main categories of safety requirements. Furthermore, the ?Safety for Human-Robot Co-Existing? could also bring structural and influential impact for next generation robots? safety certification?product liability?ethics and insurance in the future.
Keywords:
ISO 13482 Safety Standard, the Safety for Human-Robot Co-Existing, Service Robots
Date: October 17th 2013
Place: Xiyuan Hotel, No.1, Sanlihe Road, Daidian District, Beijing, CHINA
Language: English
Q1. What?s the full name of this meeting? What?s its mission?
Virk: Well? the meeting we are attending is? There are several working groups working in the area of robot standardization. There are something like 5 or 6 working groups and those meeting are being hold during this week and next week. The meeting that I am involved in are related to robot safety, other meeting are related to robot vocabulary and to robot performance, and also we have a meeting, a plenary meeting of the mother committee of all the working group. So we have to make out our reports and this meeting is normally every 18 months. So, there are several groups, and they are all dealing with robots, different types of robots. For example, this week I am involved in a meeting to do with medical robots, next week we will be involved in personal care robots which is the one you are talking about. So medical robots also have to be safe, but they have different regulations, so robot safety for medical robots is different from industrial robots, and safety for personal care robots, or service robots is different again. Each of the different application sector has different safety requirements.
Q2. I see, could you please explain what is robot vocabulary?
Virk: It calls what we are trying to do is to make sure that everybody understands when we use the term, everybody knows exact meaning of that term. For example, the word ?robot?, if you don?t have a definition it can mean many things like humanoid robot, manufacturing robot, or car-like robot, you know. So it is important to have a definition or the common vocabulary, so there is a standard, it?s ISO 8373, and it recently been updated in last year 2012, I think. Which is trying to define the all the key terms of the area of robotics. So what is a robot, a robotic device, a controller, all the terms they are using in a robotic sense. It?s very crucial for us to have a common terminology.
Q3. ISO 13482- Safety Standard for Personal Care Robots is the world?s first safety standard aimed specifically for service robots. Why it is so important? What impact might be caused without this new standard (especially for robotics industry)?
Virk: Up to now the only type of robots that exist are the industrial robots, they started being commercialized about in the middle of 60s, and first standardized was something like in the middle of 80s, and this was what to do with the industrial robots. Of course, all countries have to ensure that their products are safe so when you have an industrial robot this is a very big and powerful machine, and so the normal design methodology of industrial robots are that these are very dangerous systems, and they are designed on a basis that a human would be no way near the machine when it is moving, because it can do a lot of damages. So the safety requirements that exist right now are based on this separate principle, that human and robot will be separated, by either the real cage or the virtual cage. Now over the last 10 to 15 years, many countries and many companies have been trying to develop robots where the human is actually quite close because the robots are not manufacturing something what is trying to provide service to human and there are many different types of services. So now when you have a service to be provided, you can?t have the separation anymore, when you don?t have a safety requirement for the safety without separation you have to actually develop the requirement to allow humans and robots to share the same space while the robots are operational. This is why the new standard 13482 is so important, because it will be the first robot safety standard made by international ISO which allows robots and humans to touch each other, share the same space, provide the services we are talking about. Without that a company can try to sell a robot, but in case there is a problem, people like yourself ? legal, the company will be taken into court, they have to prove that their robots have made safe enough, without internationally acceptable requirement it is very difficult for a company to prove that what they have done is safe. Note that ISO is a voluntary thing, all the countries interested in robotics are invited to participate, and there is a lot of voting going on. So we agree that the requirements are published as a document and there are different organizations, if I make a robot, and somebody tests my robot against the safety requirements and yes I certified that this robot matched the requirements. So when you do that, and a company can go to a court and say? Look! I have a certificate here, which says I comply with the requirements, I did all the things internationally agreed, the robot is as safe as it can be?. It?s somehow guaranty you know in case something happens. If a car killed somebody is it the driver?s fault or the car manufacturer?s fault? If you can prove there is a design fault in the car from the manufacturer, then the car manufacturer will be legally liable. It?s the same in the robots? case. In the robotic (field), it says we don?t have the requirements yet, that?s why this first standard is so important. It set the bench, and of course because it is new maybe it is needed to be redefined. Next stage, we will do some further work, so it is first time you do something and it will be improved. And every three years there is a process that the committee have to look at the standard and say is it still valid? So it becomes a maintenance item and it?s reviewed and it?s updated.
Q4. Could you please introduce your organization ISO/TC 184/SC 2 and its working groups to our readers?
Virk: Sub-committee 2 started life and run about 1983, I think. And it was trying to standardize the area of robotics, it started life something like robots for manufacturing applications or environments, because that where they are largely used. Then, a little bit later it was extended to robots for industrial environments, because industrial environment is supposed to be wider than manufacturing, you know like the factory. Now in 2006 it was extended to be ?robots and robotic devices?. So the sub-committee is now called it robots and robotic devices which means that now robots are in different environments so we are now supposed to be developing a robots which can be anywhere. So, up to now it has been focusing on manufacturing, industrial environments and now just robots, OK? And for the different applications maybe we have different requirements. So this sub-committee 2 is the main committee with ISO, it is the only committee deals with robots standardization. There some committees in IEC which is the electrical technical committee which deals with for example household robots because they have specific things like vacuum cleaning robots like Roomba and so on, but there are some cooperation between IEC and ISO. When the term robot comes in, the ISO is the main partner because robots are seen to have mechanical hazards where IEC is dealing with mainly electrical technical issues, and the robot is not only electrical but mechanical. It can hit you, it can harm you, it can beat you, it can grab you which are all mechanical hazards that why the ISO committee is a quite important committee for the robot to expectable
Again, ISO and IEC have strong cooperation, especially for medical group, there was just a meeting today. The IEC has been very strong arm in the area of medical electrical equipment, so when you started to talking on the area of medical robots, you have now use the expertise of ISO from robotics, but the expertise of IEC from the medical equipment side. So the medical robots group is actually a joint committee between IEC and ISO. There is a meeting which started yesterday and today, the final day will be tomorrow for the medical robots side.
Q5. When did you decide to develop the ISO 13482? By what motive?
Virk: The formal decision was made in 2008, when the new work item has started we started looking at the issue in 2005 which when we sensed service robots standard is needed, so we have to start looking at what standard we needed? Which one is more important? And some of the priority we created. In 2006, we have of course decided robot safety was the most important, for two years we started to looking at robot safety for service robots and it was decided in 2008 to focus on personal care robots, because the personal aspect of a robot and a person that contact issue is the key and this is why 13482 was the first safety issue, and that was started in 2008. And it?s kind of now finishing, we have reached now so called final draft stage of the standard we called FDS/FDIS stage, final draft international standard, which means all the technical things have been satisfied and we are going to have a final ballet where all the countries will be asked to make some editorial type of graphical types of comments if there is something like that, and then it should be published within 3 months. It just made this year, but probably January or February 2014 it should be published,
And the motive, it was clear that human and robot have to coexist, that was the main reason.
Q6. When the ISO 13482 will be published to the world? Where can we download/access the documents?
Virk: I will say early 2014. You can download it from the ISO website, but you have to buy it, it can?t be downloaded for free. Unfortunately, the model of ISO and IEC is the governments have develop it and there are some organization bodies are funded by people of organizations have to buy it. Personally, I think it is a kind of problem, some of us are trying to say that we should have a different funding model. Somehow the money have to be spent, maybe the government should fund us. But we are losing the battle, OK. The governments decided you have to buy it.
Q7. How do you select the members for WG7? How many representatives come from China?
Virk: OK, we don?t select, what happened is normally WG7 this group is set up, there is something called the call-for-experts. First of all, there are something said there is a proposal to do work in this area so all the countries are invited to say ?is it interesting??, and ?do you supported it??, there is a ballet for that, there is a simple yes or no. For the work item proposal to be accepted you must have a simple majority, OK. With the sub-committee 2, I think there are 21 so called P-members, P means ?Participating? and there are some O-members which means ?Observing Members?, so countries have to pay to join as the member. For example, China? robotics is interesting, so China join as the P-member. So 21 members, for example 15 votes you must get the minimum of 8 Yes and 7 No, then you have the simple majority. Maybe only 2 votes and both say yes it's the majority, this is the simple rule. So the numbers of P-member voting you must have the majority, it is the first thing. And the second thing is that you must have a minimum of 5 countries offering experts to work on the project. If the number of P-members is very small, for example maybe 10 or 9 then you can be reduced to 4 or lower. You know if there is an area which is so new like Nano-technology, maybe 5 years ago or 10 years ago there is only 1 country involved, then you can?t have 10 members or 5 members, right? So, they have some special rules, but within robotics there are enough members, 5 countries must offer experts to work in this area. If China decided yes they are interested in robotics, they then offer experts to work in the area. As to China, I think currently has 2 members?
Yang: Only one, Prof. Chanjun Yang (杨灿军) from the Zhejiang University. Prof. ChanjunYang he is an expert on rehabilitation robots and so on. So we have one person from China involved in WG7. Right now I am trying to get Shuping to make some more.
Q8. Could you please explain the ?O-member? again?
Virk: O is the ?Observing Member?, which means they can?t participating the work items but the can get the documents and they can read it. They can?t influence the working group, and they paid less as an O-member. Theoretically, they can attend the meeting but they should sit behind, but normally it can be a less talk and so on. But officially they can?t vote.
Q9. The new ISO 13482 includes (1)Mobile Servant Robots,(2)Person Carrier Robots,(3)Physical Assistant Robots. Could you please introduce the basic concepts for the three main types of robot technologies?
Virk: The ?Mobile Servant Robot? is a type of robot, it is of course mobile and is able to travel, so it is like a robot for domestic setting, it does some various tasks for you. So you give it some instructions and it does the job for you, for example: ?fetch me something? and it fetch something and give it to you.
Weng: Do you mean that it can operate autonomously without human remote control?
Virk: Sure, so it does the task for you, the task can be quite simple. It could be a Roomba type robot, it could be like a mobile servant robot, it cleaning the floor for you, OK.
Then, the ?Person Carrier Robot? is a robot which helps you move from point A to point B. It is like a car robot, but it is the car not on the highway, it off the highway, so it could be a car in your home, it could be in the airport or something like that, OK? But not on the highway.
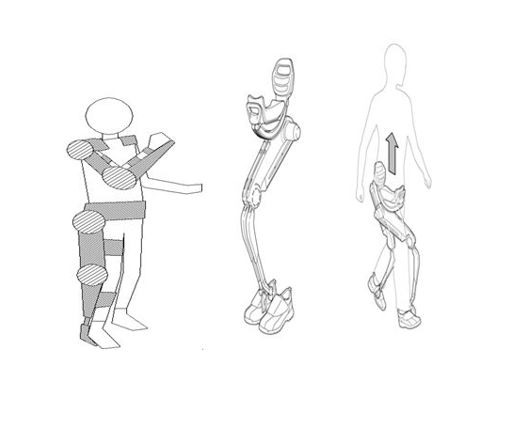
?Physical Assistant Robot? is a robot physically assists you - a person to perform a task, like an exoskeleton, you wear that and it helps you walk or lift something.
Those are three types of robots that are in the personal care category.
"Mobile Servant Robots"
Q10. As to Mobile Servant Robots, does the ISO 13482 also cover the safety for an autonomous servant robot equipped with Neural Networks or Genetic Algorithm?
Virk: It does not specific see the methodology of any kind of how you do something, it is not covered in the standard. What it says is that if you use Neural Networks or Genetic Algorithm, those controllers must to satisfy safety requirements. So, it doesn?t say how you do it. It?s the What-You-Must-Do, but not the How-You-Must-Do.
?Physical Assistant Robots?
Q11. Early this year, I was in Tokyo and I got the news that Tsukuba?s Cyberdyne announced that their Person Carrier Robots - HAL had got the ISO/DIS 13482?s safety certification? My questions are two, (1) What?s potential hazards in regard to a robotic suit like HAL? (2) What?s the basic idea of ISO/DIS 13482?s safety certification?
Virk: When you put on an exoskeleton and to assist you in the way the household does. Clearly the thing that can go wrong is the exoskeleton might try to move your joint in a way you can?t do it, like bend your elbow that way, and you will break your elbow. The angle that your joint can normally move maybe violated if the exoskeleton somehow developed with a fault. This is a potential safety hazard.
It may try to move the joint in the way which the human body is not mean to move, and if it is not mean to move like that, you will break your joint. And breaking your joint is actually a safety hazard, so that?s the potential hazard.
Now the way the standard handle that there are two ways you can handle it. First, there is concept of ?Low-Risk Device?, which means the exoskeleton that ?the human is more powerful than the exoskeleton?. So, the system that can give you is that most 50% of yours. If I am 60% and the system is 40% to make 100% I need, and 40% is actually enough fault I can resist it, because I am stronger than it. So, it can not break my joint. In this way the exoskeleton is to providing more levels of assistances can be seen to be safer than the assistances which are high level. So if I am weak, I only have 20% functionality, I can?t move and the exoskeleton is providing 80% for me to move, then you can imagine the robot if there is a fault, it is normally stronger than me and it could be the one that break my joint. As to the other one, I have to get more complexity and I have get to attach more sensors, more controllers, and checking is it right? So it tends to be more expensive to make it safe. So the higher power devices tend to be more expensive to achieve the safety you are, and that covers in the 13482 standard

?Person Carrier Robots?
Q12. Waseda University?s Prof. Atsuo Takanishi told me that there will be three fundamental requirements to establish a legal regulation system for next generation robots, safety certification, insurance and black box (recorder). What?s the major difference between new ISO 13482?s safety certification and current industrial robots? safety certification?
Virk: Well the concept of black box has been mentioned, the concept of insurance, all these things certifications has been mentioned. But, how it to be developed, no body knows yet. So I think once 13482 safety standard published then each country will has to start developing some methods for verifying, particularly designs to the clauses from the standard. So they will have to develop some tests to check and as the knowledge developed, things may become a bit more harmonized. Initially, maybe what happened in Japan is different to what happened in Europe, or different to what happened in China, something like that. So this is why WG7 is now started to look at the next stage ? ?How 13482 should be used?.
WENG: Do you mean that safety certification will be included at the next stage for 13482?
Virk: Yes, it how 13482 should be used, for users and then for regulators to verify the clauses. As I said, it likes I have a lot of clauses and you used the method X to achieve that safety. Now, for you, for somebody independent to check the method that developed a test, OK. If the test doesn?t exist, they will come out with something. So, you will have lots of tests involved in different countries, there will be lots of different things happening. Until ISO kind of certification out, different countries will use different things.
The next step is that there will be an ISO validation process. The key idea of the next stage is ?how companies should use this new standard?? and ?how regulators and certification bodies should verify the clauses??, two things which we will be looking at next stage during this week. To start that actual process we will have three years from now.
Q13. National Taiwan University - iCeiRA?s Prof. Ren C. Luo told me that his ?massage robot? has a demand for safety certification. Does this kind of service robot apply to ISO 13482?
Virk: Now I don?t know the massage is a medical thing or it is a non-medical thing?
Weng: It?s a medical thing I guess.
Virk: Of course, it requires safety certification but it could be medical safety. So it is a service robot, but it is a medical service robot. Medical devices are regulated differently, unlike the robot up to now is only a machine, when you are making a medical robot, it is a medical device, so the regulations for medical devices are difficult. So that?s why we have several groups for medical robot. So this massage robot should be more belong to the medical robot area.
Q14. Foxconn had considered to deploy more industrial robot into assemble lines. New generation of industrial robots like Baxter and NextGene can co-exist with human workers. Based on my survey, it apply to another ISO 10218 revision. Could you please introduce the ISO 10218 revision to our readers?
Virk: 10218 apply to industrial safety, normally the robots and humans are separated. Now the industrial sectors are moving toward to cooperation, cooperative robots something like that. For example the Baxter type robots are very very weak robots from power point of view. Also, they are slow moving.
So in that way, now we are trying to make something substantial. Of course, the manufacturing robots need power, but Baxter doesn?t powerful, they can only do small things and slow things. From the point of view, that?s why the safety aspects are, so you know people are claiming that Baxter is an inherently safety machine because it move very slowly and human can get out of the way. There is a speed of something like 120 mm/s, I don?t remember in my head, but there is a figure, so if a robot moves slower than that normally means that human can move out of the way.
So if I kind of hit you like that it not mean to you too much. Baxter leads based on the principles. The slower is not the problem but the power is certainly a problem. If you want to do some real manufacturing, the robots need to be powerful, that?s the main problem with Baxter and industrial robots. But the industrial robot group is trying to look at how industrial robot can be design in a way to allow human cooperation. It hasn?t happen yet, but they try to do that, and the way they are trying to do that is they are trying to define some way in which that ?how hard can a robot hit a human before they caused injury?? and of course injury can?t be accepted so what that group is trying to do is looking at things like ?Pain Threshold?. We as humans we sense pressure, if a robot applies force on you it is pressure, you sensed the force. If I add force and I keeping increase it, the force goes higher and higher, it becomes a point that where force becomes pain. So that transition between ?sensing force? and ?feeling pain? is being to be the first point. The group wants to seek the sensation from force to pain as threshold at different parts of the human body, I think 29 points of the body are defined, and different types of surfaces, all experiments have to been carried out with a view to how much force can be applied to different parse of the human body before the person feels pain. Now pain is still not an injury so they using that as the safety limits when they start to bruise that is an injury, cut that is an injury, broken bone that is a serious injury, and death wow. So, the lowest level of not injury but in that scale is pain, pain is what they are looking at.
Q15. Could you please mention the basic idea of ISO 13482?s safety guidelines for human-robot interaction? How does ?Human Error? to be considered in the guideline?
Virk: There is a standard which is further done in which is 12100 the basic requirements, risk assessment something like that. So this describes basic methodology which one has to follow to design safe machinery.
13482 follows this design methodology as does the 10218, so all the safety standards follow this 12100, and the methodology basically follows a three steps process. First of all, you are trying to design your system, in this case your system is your robot, you design your robot to be inherently safe, so you make sure it?s small, it?s light weight, it?s not powerful, it?s move very slowly, all these kinds of things, right? So, it can?t hurt you in a serious way, it?s ?inherently safe?. This is the first step.
But normally if you have to do a particular task like an exoskeleton, it has to carry a 100 kg man, so it can?t be light weight, and it has to carry big motors you know, so when you can?t make inherently safe because of what it has to do, thenwhat you have to do is you have to put it into ?Protective Measures?. Because of the power of the motor, of course if the joint move to the wrong way or something, you have to put it in protected measures to make sure they don?t do that. So step 2 is the ?Protective Measure?. So you basically try to put in some methodology that the danger the hazard you identified are reduced.
Each step is trying to reduce the risk, to see if it is at the acceptable level, you can?t reduced it to zero, the step three is that the car for example, car is a very danger of thing, so for the car you either produce some training or some other regulations, or you put in some what the normal term is you put information for use. This is how you should use it. For example, you put a label, you can say ?This is a dangerous thing, use with care?, so you put some warning side or some other methodology. These are the three steps, and all the standards follow this three steps process, and so you identified the hazards, so this is the way things can go wrong; and if it goes wrong, in any of those ways you have some protective measure, and last one is the information for use, that?s the normal process.
Q16. In 2007, Japanese Ministry of Economy, Trade and Industry had published a Safety Guideline for Next Generation Robots. Do you have any comment on it?
Virk: I haven?t seen that one but I don?t know so much about that, I guess in 2007 we have just started and Japan has been involved, in the all the work.
2007 is very early on, so they probably mentioned, because when was that we realized safety was the most important thing if the new robot is gonna be developed and accepted, we must ensure safety was guaranteed at international level. If it said that, I guess that?s what they did.
Q17. An emerging risk ?Open-Texture Risk? ? risk occurring from unpredictable interactions in unstructured environments will gradually become a critical issue regarding the robot safety for next generation robots. It seems that traditional safety standard can not effectively solve this problem. Does the ISO 13482 has any strategies for this problem?
Virk: &A high risk area and the possibility of harm is very high, and it is unlikely that a robot there will be the first emerging markets. Right now we are looking at how autonomous can make the robot and when autonomy is seen to, you know, autonomy can either increase the risk or it can reduce the risk, for example the car, a car in certain cases, a car can sense and proceed faster than human reaction. So, in that case the autonomy could actually improve the safety; and in other cases autonomy could be seen to worse the safety. So the link between autonomy and risk is actually not always in same direction, so we have to be careful to be looking at when autonomy increase the risk that?s the bad area, why introduce the risk while autonomy make thing going worse? So you should add autonomy where is reducing the risk because the human reaction is too slow or some other you know thinking in that of environment so high risk area where risk is getting worse, why introduce autonomy it could be a fundamentally through approach, until you developed sufficient autonomous robot and so on. And that is actually been look at in some of the safety works already.
Plus, autonomy and risk do not have correlation it depends on how you use it, you can increase or reduce risk. If you want to increase then you have to think why I am increase the risk? Why do I make this system more risky?For example, an old surgeon who is a very experienced surgeon but now he is very old, he has some shaking hands, so maybe the robot can filter out so he is tele-operating the robot scalpel, he is moving very smoothly, and they will reducing the risk by autonomously remove the tumor. So this is the case that I address, don?t go for the high risk area, especially to touch on some people like you the legal people.
Q18. Do you (ISO 13482) have any cooperation with legal institutes or insurance companies?
Virk: Well, I have lots of emails like yourself, there are lawyers and so on who are becoming aware of the standard, they are asking questions like you are asking, What happen like this and What happen like that, etc?So lawyers are becoming involved and there are some thought of general awareness and so on. As soon as the robots are commercialized and accidents will happen, there will be things happening in the future.
In terms of actual cooperating, no I am just replying like that I am working with you to give information something like that.
Q19. My colleague of European FP7 RoboLaw Project, Dr. Pericle Salvini told me that they have conducted an experiment for the DustCart robot to perform its duty (collecting trash) on public streets in an Italian small town. They found that except to legal regulations, the other obstacle is about the insurance. The insurance company said it is difficult to calculate the insurance rate of their robots since the uncertainty is high. Do you believe that the ISO 13482 might help the insurance companies to provide their packages?
Virk: I think it will help because it developed the methodology, it identified the low risk applications, and the low risk applications will certainly be in the area where the smart manufacturers will adopt it. Because this is the low risk one, and it is easy to insure and so on.
I knew this particular case because Paolo told me about this, he could get insurance for this thing, and he still did it. He took the risk, and fortunately for him everything worked out. But I told him this and of course you know if you took the risk and something going wrong your university will be probably finished you know. It was a big risk, and I will never take it if I was him because it is not worth this kind of thing. The public liability is enormous. Because of him, the robot could be tested in the public environment, thankfully he got the way of this.
Q20. Since 2003, there exist special zones called ?Tokku? (deregulation zones), where companies or research laboratories can carry out tests with robots in public environments without any special licenses. Do you have any comments for the deregulation zones in Japan?
Virk: I think this kind of thing will encourage robot research develop agency to develop confidence by other people something like that. I mean normally you have to have such high, I mean developing new technology in this very very litigious society, it is not so easy like 50 or 60 years ago. It was is easy to get them developed but now it is so difficult, that would demand 100% safe robots, so having any kinds of inducements introduce new technologies to increase public confidence. So I like this ideas.
Q21. Actually, the new ISO 13482 and ISO 10218 revision might bring some impacts to the law. For example, in the past, industrial robots are isolated by the iron cage due to the requirements from labor law. But, now the labor law should be revised, to remove the requirement of iron cage. Besides, we will able to decide what is safety, tolerable risk and danger when we have the safety standard for service robots, it is crucial for the defect judgment of product liability. However, there is one single question that is unsolvable ? if people got injury due to autonomous service robots decision failure, who is liable, the manufacturer, designer or holder?
Here my question is that can functional safety avoid the decision failure situation? Or on the contrary, in some specific situation functional safety might lead to decision failure?
Virk: Right now the way kind of work is you actually go to the manufacturing system integrator, robot system integrator who tends to be liable. You can buy a KUKA robot, you can buy an ABB robot, or Yaskawa robot, and you integrated then together, then the integrator is liable. Unless robot has particular design fault and so on, so it is difficult to prove that robot?s fault, but if a problem be relevant is the person who design that integrate system become liable. So that is the current process for industrial robots.
Now I should introduce the cooperative systems what happening is this system being very little actually cooperation things, because the liability is become quite huge. For industrial robots, people are talking about cooperation windows, for example so in this cage you have a small window and human may put his arm through two hands to work with the robot on the other side, OK. So we will only take care of when he is near that window what to do, for example if there are fingers symbol wave and it must slow down, things like that. That?s from the industrial side, but for service robot side it is totally different. Service robots are designing inherently for robots and humans to be safe. For industrial robots it a different approach.
Q22. Does your standard have any IP policy, if the answer is yes, who is the contributor? Do they have license?
Virk: NO, there is no IP policy in that.
Q23. Do your standard have any trademark rights? Such as Google?s Android, is it charged or free (like wi-fi)?
Virk: No, not at all, yet it the standard developed by the working group and it will be available as normal standard are being used
Q24. I was a visiting researcher at Humanoid Robotics Institute, Waseda University. Frankly, I am very interested in the safety issues of Takanishi lab.?s WABIAN-2R Bipedal-Walking Humanoid Robots. From your insight, what is the major different between ISO 13482?S mobile servant robot and bipedal-walking humanoid? What is the major challenge for bipedal-walking humanoid regarding its safety?
Virk: Well, I think the bipedal walking humanoid depending on what its task is, it could be an example for the mobile servant robot and it could be a personal carrier robot, it could actually carry out a task for you, or it could actually carry for example. I know they debut carried cooperatively heavy load, so it could be a physical assistant robot. It depends on the use of humanoid robot, or it could be even carry you I guess, it could be any one of the three categories of the robots depend on what it supposed to do.
However, in terms of stability and so on, we know that two legged walking is quite challenging task, so having a humanoid robot performs this kind of things have to face quite lot safety challenges, for example: to ensure you carry a human, walking also, these are what I would imagine the major challenges for bipedal walking robots regarding its safety.
Q25. Does ISO/TC 184/SC 2 consider to make a safety standard for Google?s self-driving robo-car?
Virk: No, the robocar, is on the highways. A car has the different regulations than a personal carrier robot.
Q26. What?s your insight for the 20 years future of robot safety? Do you believe Georgia Tech Prof. Ron C. Arkin?s ?Embedded Ethics? concept might be an application of robot safety?
Virk: Well, ethics is becoming more important, not only Ron Arkin. Arkin is doing quite lot military type of robots, but ethics is becoming quite important.
General speaking all over the world regarding you developed a robot for application X, and it can be more or less application Y. X is quite desirable, Y is not so desirable. For example like a physical assistant robot to help old people move over about people would agree this is a very good thing but the same robot could be used for helping soldiers become more effective on the battlefield and many people will not like, but ethics are becoming quite important.
